Example: Unwrapping a lamellipodia#
To illustrate the unwrapping steps, we will use an example of a lamellipodia which was segmented from the surface of a cell.
The mesh is located in ../../data/mesh/protrusions/lamellipodia_protrusion_01.obj. We will show:
conformal map to disk
equiareal disk map by relaxing area distortion
obtain a square map by ‘squaring’ the disk
optimize the aspect ratio of the square map using the beltrami coefficient
0. Read in the surface mesh#
import unwrap3D.Mesh.meshtools as meshtools
import unwrap3D.Utility_Functions.file_io as fio # for common IO functions
import unwrap3D.Unzipping.unzip as uzip
import os
import numpy as np
import pylab as plt
"""
Specifying image file location and parsing its name.
"""
meshfolder = '../../data/mesh/protrusions'
meshfile = os.path.join(meshfolder, 'lamellipodia_protrusion_01.obj')
basefname = os.path.split(meshfile)[-1].split('.obj')[0] # get the filename with extension
mesh_S = meshtools.read_mesh(meshfile,
keep_largest_only=True) # read only the largest if there is multiple separate objects in the mesh
# parse the curvature colormap
curvature_color = mesh_S.visual.vertex_colors[:,:3]
"""
Create a master save folder
"""
savefolder = os.path.join('example_results',
basefname)
fio.mkdir(savefolder) # auto generates the specified folder structure if doesn't currently exist.
"""
Visualize the input mesh
"""
'\nVisualize the input mesh\n'
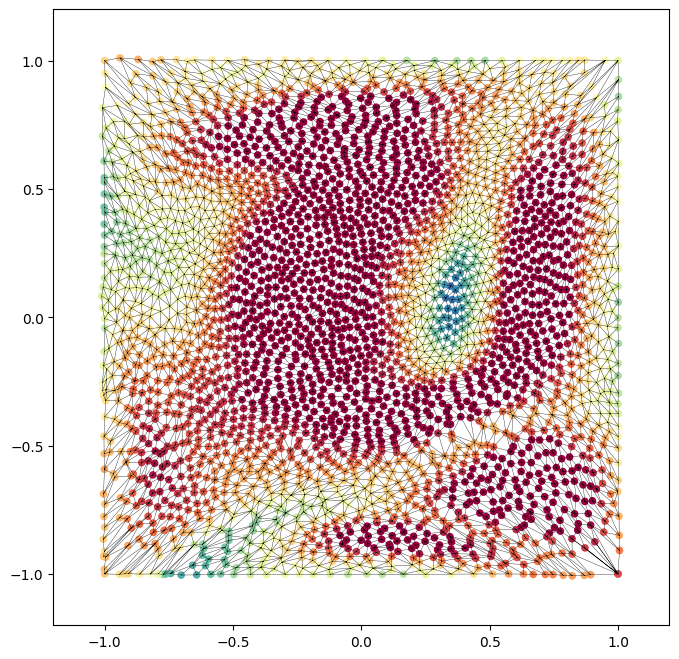
1. conformal map to the unit disk#
If the input mesh has poor triangle quality, then it is recommended to perform isotropic remesh. Furthermore, If the input mesh has holes, detected by checking the number of outputs of igl.all_boundary_loop after importing the igl library. If it is greater than 1, then you will need to first conduct mesh repair to ‘fill-in’ the holes (all loops that is not the longest) so that the surface is simple.
# check for holes
import igl
boundaries = igl.all_boundary_loop(mesh_S.faces) # we expect only 1
print('detected %d boundaries' %(len(boundaries)))
assert(len(boundaries)==1)
# the disk mapping is provided via the rectangular conformal mapping function.
disk_coords = meshtools.rectangular_conformal_map(mesh_S.vertices,
mesh_S.faces,
corner=None,
random_state=0)
print(disk_coords.shape)
# scatter plot the vertices, plot the face connectivity using matplotlib triplot
plt.figure(figsize=(8,8))
plt.scatter(disk_coords[:,0],
disk_coords[:,1],
s=20,
c=curvature_color/255.)
plt.triplot(disk_coords[:,0],
disk_coords[:,1],
mesh_S.faces,
'k-', lw=.25)
plt.xlim([-1.2,1.2])
plt.ylim([-1.2,1.2])
plt.gca().set_aspect('equal')
plt.show()
# create a mesh of the disk
disk_mesh = mesh_S.copy()
disk_mesh.vertices = np.hstack([np.ones(len(disk_coords))[:,None],
disk_coords]) # we need to make it 3D to save in mesh format
tmp = disk_mesh.export(os.path.join(savefolder,
'conformal_disk_'+basefname+'.obj'))
detected 1 boundaries
(3057, 2)
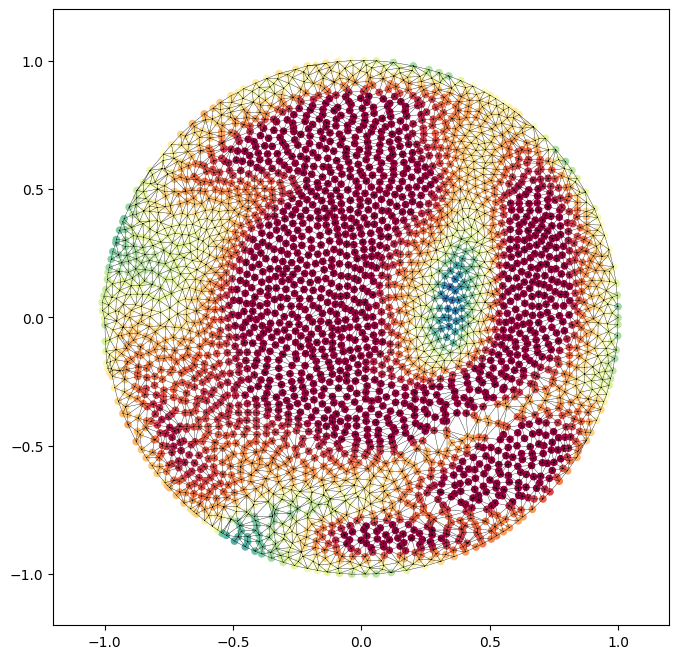
2. equiareal disk map by relaxation#
Unlike the spherical case, the topology changes in the area relaxation. This is because the relaxation here is much more sensitive to triangulation. Each iteration uses delaunay triangle flipping to improve triangulation and mitigate foldovers. Consequently in each step we have vertices, v and faces, f. The number of vertices is the same, the connectivity of f changes per iteration.
v_steps, f_steps, area_distortion_iter = meshtools.area_distortion_flow_relax_disk(disk_mesh,
mesh_S,
max_iter=50,
delta_h_bound=0.5,
stepsize=1.,
flip_delaunay=True,
robust_L=False, # we can relax more by setting this off
mollify_factor=1e-5,
eps = 1e-2, # regularization factor
debugviz=False,
debugviz_tri=False) # set True if you want to watch the mesh relax.
4%|▍ | 2/50 [00:00<00:05, 9.14it/s]
hello
hello
8%|▊ | 4/50 [00:00<00:05, 9.13it/s]
hello
hello
12%|█▏ | 6/50 [00:00<00:04, 9.43it/s]
hello
hello
14%|█▍ | 7/50 [00:00<00:04, 9.49it/s]
hello
hello
18%|█▊ | 9/50 [00:00<00:04, 9.80it/s]
hello
hello
hello
24%|██▍ | 12/50 [00:01<00:03, 9.50it/s]
hello
hello
28%|██▊ | 14/50 [00:01<00:03, 9.12it/s]
hello
hello
32%|███▏ | 16/50 [00:01<00:03, 8.93it/s]
hello
hello
hello
40%|████ | 20/50 [00:02<00:03, 9.84it/s]
hello
hello
44%|████▍ | 22/50 [00:02<00:02, 10.07it/s]
hello
hello
48%|████▊ | 24/50 [00:02<00:02, 10.20it/s]
hello
hello
52%|█████▏ | 26/50 [00:02<00:02, 10.25it/s]
hello
hello
56%|█████▌ | 28/50 [00:02<00:02, 10.37it/s]
hello
hello
hello
60%|██████ | 30/50 [00:03<00:01, 10.38it/s]
hello
hello
hello
64%|██████▍ | 32/50 [00:03<00:01, 10.53it/s]
hello
hello
70%|███████ | 35/50 [00:03<00:01, 8.85it/s]
hello
hello
74%|███████▍ | 37/50 [00:03<00:01, 8.34it/s]
hello
hello
78%|███████▊ | 39/50 [00:04<00:01, 8.68it/s]
hello
hello
82%|████████▏ | 41/50 [00:04<00:00, 9.07it/s]
hello
hello
86%|████████▌ | 43/50 [00:04<00:00, 9.64it/s]
hello
hello
hello
94%|█████████▍| 47/50 [00:04<00:00, 10.46it/s]
hello
hello
98%|█████████▊| 49/50 [00:05<00:00, 10.54it/s]
hello
hello
hello
100%|██████████| 50/50 [00:05<00:00, 9.62it/s]
import unwrap3D.Analysis_Functions.timeseries as tsa
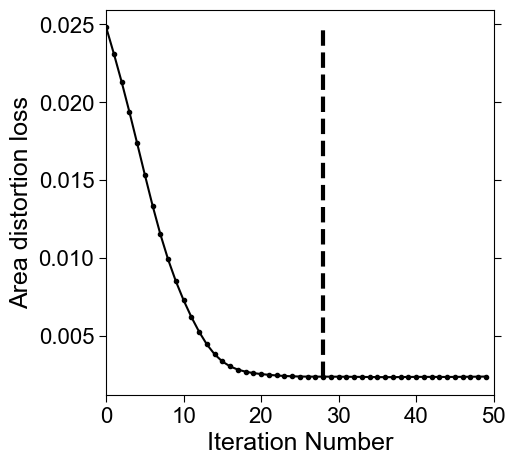
# monitor the mean area distortion per iteration to find the optimal stopping
mean_area_distortion_iter = np.nanmean(np.array(area_distortion_iter),axis=1)
if len(area_distortion_iter) > 0:
# smooth the area_distortion_curve helps finding the stopping, unlike spherical case, this curve is typically more bumpy
mean_area_distortion_iter = tsa.baseline_als(mean_area_distortion_iter, lam=1, p=0.1)
change = np.arange(len(mean_area_distortion_iter))[1:][np.diff(mean_area_distortion_iter)>0]
if len(change) > 0:
min_distort_id = np.maximum(0, change[0])
else:
min_distort_id = np.maximum(0,len(mean_area_distortion_iter))
else:
min_distort_id = 0
# plot the curve and overlay the final
fig, ax = plt.subplots(figsize=(5,5))
plt.plot(np.arange(0,len(mean_area_distortion_iter)),
mean_area_distortion_iter, '.-', color='k')
plt.vlines(min_distort_id,
np.nanmin(mean_area_distortion_iter[~np.isinf(mean_area_distortion_iter)]),
np.nanmax(mean_area_distortion_iter[~np.isinf(mean_area_distortion_iter)]), 'k', linestyles='dashed', lw=3)
plt.tick_params(length=5, right=True)
plt.xticks(fontsize=16, fontname='Arial')
plt.yticks(fontsize=16, fontname='Arial')
plt.xlim([0,50])
plt.xlabel('Iteration Number', fontsize=18, fontname='Arial')
plt.ylabel('Area distortion loss', fontsize=18, fontname='Arial')
plt.savefig(os.path.join(savefolder,
'area-distortion_relax_iterations_'+basefname.replace('.obj', '.svg')), bbox_inches='tight')
plt.show()
# create the new mehs
equiareal_disk_mesh = disk_mesh.copy()
equiareal_disk_mesh.vertices[:,1:] = v_steps[min_distort_id][:,1:] # this is if we want to maintain the same 1st coordinate as the disk_mesh we created earlier
equiareal_disk_mesh.faces = f_steps[min_distort_id]
tmp = equiareal_disk_mesh.export(os.path.join(savefolder,
'equiareal_disk_'+basefname+'.obj'))
# revisualize: scatterplot the vertices, plot the face connectivity using matplotlib triplot
disk_coords = equiareal_disk_mesh.vertices[:,1:].copy()
plt.figure(figsize=(8,8))
plt.scatter(disk_coords[:,0],
disk_coords[:,1],
s=20,
c=curvature_color/255.)
plt.triplot(disk_coords[:,0],
disk_coords[:,1],
equiareal_disk_mesh.faces,
'k-', lw=.25)
plt.xlim([-1.2,1.2])
plt.ylim([-1.2,1.2])
plt.gca().set_aspect('equal')
plt.show()
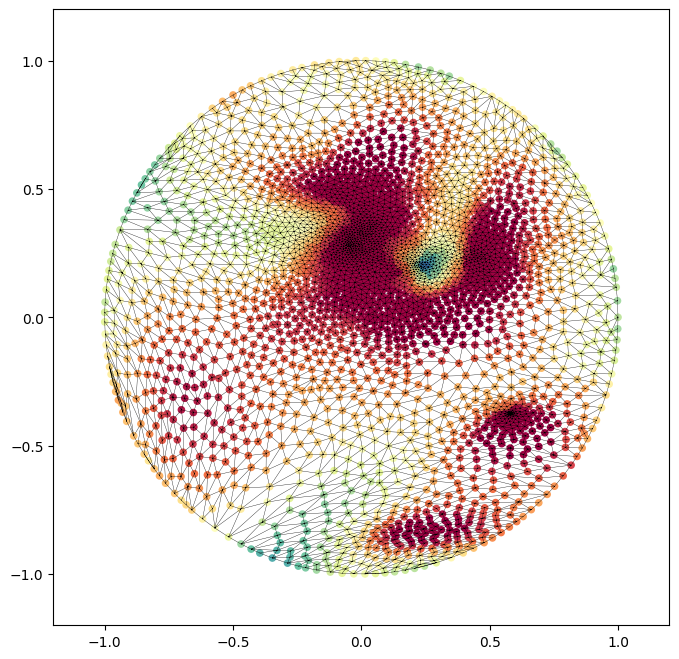
3. squaring the disk#
There are a number of bijective mathematical transformations that have been developed to ‘square the disk’ and the inverse, ‘circularize the square’. See Fong’s Analytical Methods for Squaring the Disc for the mathematical formulae and explanations. These mappings transform the unit disk to the unit square and vice-versa. They do not change the number of vertices or the face connectivity.
u-Unwrap3D implements the squircircle and elliptical-powell in the geometry module, unwrap3D.Geometry.geometry. Here we will use the elliptical-powell method.
import unwrap3D.Geometry.geometry as geom
square_coords = geom.elliptical_nowell(disk_coords)
square_mesh = equiareal_disk_mesh.copy()
square_mesh.vertices[:,1:] = square_coords
tmp = square_mesh.export(os.path.join(savefolder,
'equiareal_square_'+basefname+'.obj'))
# revisualize: scatterplot the vertices, plot the face connectivity using matplotlib triplot
plt.figure(figsize=(8,8))
plt.scatter(square_coords[:,0],
square_coords[:,1],
s=20,
c=curvature_color/255.)
plt.triplot(square_coords[:,0],
square_coords[:,1],
square_mesh.faces,
'k-', lw=.25)
plt.xlim([-1.2,1.2])
plt.ylim([-1.2,1.2])
plt.gca().set_aspect('equal')
plt.show()
c:\Users\s205272\AppData\Local\miniconda3\envs\unwrap3d_test_py310_noskfmm\lib\site-packages\unwrap3D\Geometry\geometry.py:70: RuntimeWarning: invalid value encountered in sqrt
x = .5*np.sqrt(2.+2.*u*np.sqrt(2) + u**2 - v**2) - .5*np.sqrt(2.-2.*u*np.sqrt(2) + u**2 - v**2)
c:\Users\s205272\AppData\Local\miniconda3\envs\unwrap3d_test_py310_noskfmm\lib\site-packages\unwrap3D\Geometry\geometry.py:71: RuntimeWarning: invalid value encountered in sqrt
y = .5*np.sqrt(2.+2.*v*np.sqrt(2) - u**2 + v**2) - .5*np.sqrt(2.-2.*v*np.sqrt(2) - u**2 + v**2)
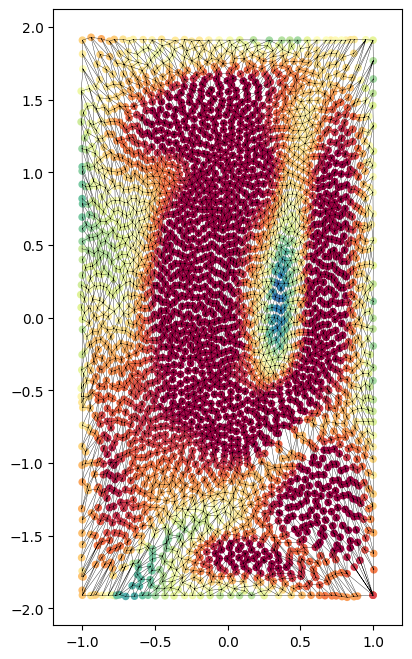
4. optimizing the aspect ratio of the square#
Just as we can optimize the aspect ratio of uv map for spherical parameterization. We can also use criteria such as the Beltrami coefficient to optimize the aspect ratio of the square parmeterization of the open surface.
from scipy.optimize import fminbound
from unwrap3D.Mesh.meshtools import beltrami_coefficient
square = square_coords.copy()
f = mesh_S.faces
v = mesh_S.vertices
def func(h):
return np.sum(np.abs(beltrami_coefficient(np.hstack([square[:,0][:,None],h*square[:,1][:,None]]), f, v))**2)
h_opt = fminbound(func, 0, 5);
print('optimal length of y-axis as fraction of x-axis: ', h_opt)
square_opt = np.vstack([square[:,0], h_opt*square[:,1]]).T;
square_mesh_opt = square_mesh.copy()
square_mesh_opt.vertices[:,1:] = square_opt
tmp = square_mesh_opt.export(os.path.join(savefolder,
'equiareal_rectangle_'+basefname+'.obj'))
# revisualize: scatterplot the vertices, plot the face connectivity using matplotlib triplot
plt.figure(figsize=(8,8))
plt.scatter(square_opt[:,0],
square_opt[:,1],
s=20,
c=curvature_color/255.)
plt.triplot(square_opt[:,0],
square_opt[:,1],
square_mesh_opt.faces,
'k-', lw=.25)
plt.xlim([-1.2,1.2])
plt.gca().set_aspect('equal')
plt.show()
c:\Users\s205272\AppData\Local\miniconda3\envs\unwrap3d_test_py310_noskfmm\lib\site-packages\unwrap3D\Mesh\meshtools.py:7299: RuntimeWarning: divide by zero encountered in divide
Mx = np.reshape(np.vstack([e1[:,1],e2[:,1],e3[:,1]])/area /2. , ((1, 3*nf)), order='F');
c:\Users\s205272\AppData\Local\miniconda3\envs\unwrap3d_test_py310_noskfmm\lib\site-packages\unwrap3D\Mesh\meshtools.py:7299: RuntimeWarning: invalid value encountered in divide
Mx = np.reshape(np.vstack([e1[:,1],e2[:,1],e3[:,1]])/area /2. , ((1, 3*nf)), order='F');
c:\Users\s205272\AppData\Local\miniconda3\envs\unwrap3d_test_py310_noskfmm\lib\site-packages\unwrap3D\Mesh\meshtools.py:7300: RuntimeWarning: divide by zero encountered in divide
My = -np.reshape(np.vstack([e1[:,0],e2[:,0],e3[:,0]])/area /2. , ((1, 3*nf)), order='F');
c:\Users\s205272\AppData\Local\miniconda3\envs\unwrap3d_test_py310_noskfmm\lib\site-packages\unwrap3D\Mesh\meshtools.py:7300: RuntimeWarning: invalid value encountered in divide
My = -np.reshape(np.vstack([e1[:,0],e2[:,0],e3[:,0]])/area /2. , ((1, 3*nf)), order='F');
c:\Users\s205272\AppData\Local\miniconda3\envs\unwrap3d_test_py310_noskfmm\lib\site-packages\unwrap3D\Mesh\meshtools.py:7324: RuntimeWarning: invalid value encountered in divide
mu = (E - G + 2 * 1j * F) / ((E + G + 2.*np.sqrt(E*G - F**2))+1e-12);
c:\Users\s205272\AppData\Local\miniconda3\envs\unwrap3d_test_py310_noskfmm\lib\site-packages\scipy\optimize\_optimize.py:2359: OptimizeWarning:
NaN result encountered.
_endprint(x, flag, fval, maxfun, xatol, disp)
optimal length of y-axis as fraction of x-axis: 1.9098300562505255